





3D-Sonargeräte der Wasseracht Augsburg-Stadt

- HUMMINBIRD 1197C, Beschaffung 2011
- SIMRAD NSS12EVO3, Beschaffung 2020
- LOWRANCE HDS PRO 16, Beschaffung 2025
Das Einsatzkonzept sieht vor, dass das SIMRAD NSS12EVO3 das Gerät der 1. Wahl im Einsatzdienst ist. Das HUMMINBIRD 1198C wird als Ersatz- und Schulungsgerät weiterhin aktiv gehalten und kann auch zusätzlich für größere Sucheinsätze hinzugezogen werden. Somit ist eine maximale Flexibilität vorhanden. Auch können für Schulungs- und Übungsfahrten beide Geräte verwendet werden.

Alarmierung und Einsatz- und Ausrückebereich
Die Einsatzgruppe Technische Suche und Ortung der Wasserwacht Augsburg-Stadt kann durch die ILS Augsburg zu primären und sekundären Einsätzen alarmiert werden, wenn Personen in Gewässern vermisst werden oder Gegenstände unter Wasser geortet werden sollen. In den Einsatz gebracht wird das 3D-Sonar durch Einsatzkräfte der Schnelleinsatzgruppe Kuhsee der Wasserwacht Augsburg-Stadt.
- Der Einsatz- und Ausrückebereich umfasst den Rettungsdienstbereich der Stadt- und Landkreise Augsburg und Aichach-Friedberg.
- Unterstützung der Einsatzgruppe Technische Suche und Ortung in anderen Bereichen kann über die ILS Augsburg bzw. den Einsatzleiter Wasserrettung der Wasserwacht Augsburg angefordert werden.
Personalbedarf
Mindestens zwei Einsatzkräfte sind mit der Bedienung des 3D-Sonargerätes gebunden, das Führen des Motorrettungsbootes ist durch diese beiden Personen nicht abgedeckt.
Einsatzkräfte sind bei einer Mannschaftsstärke von 1/4.
- 1 Gruppenführer SEG
- 1 Fahrer / Bootsführer
- 2 Sonar-Operator
- 1 Wasserretter an Bord des Sonarbootes (falls möglich)
In Ausnahmefällen ist eine Minimalbesatzung von 1/2 möglich.
- 1 Gruppenführer SEG
- 1 Fahrer / Sonar-Operator
- 1 Bootsführer / Sonar-Operator
Suchtechniken im WRD mit technischen Hilfsmitteln
Wie kann eine Suche von Personen und Gegenständen Fachdienstübergreifend in Gewässern schnell und koordiniert durchgeführt werden? Das war die Frage am Anfang des Projektes im Jahr 2010 und 2011.
Bei der bisher angewandten, konventionellen Suche in Gewässern ist ein Abtauchen des Suchgebietes mit mehreren im Einsatz befindlichen Rettungstauchern, in Tauchtrupps zusammengefasst, nötig. Einsatztaktisch werden dazu unterschiedliche Suchtechniken angewendet bei denen, teils unter Nutzung von Motorrettungsbooten oder von Land aus, meistens mehrere Rettungstaucher gleichzeitig sowie zeitlich begrenzt und in einer Taucherkette mit maximal drei Rettungstauchern je Tauchtrupp eingebunden zum Einsatz kommen. Dabei tasten sich die Rettungstaucher – meist ohne Sicht – auf dem Gewässerboden voran. In seltenen Fällen ist die Sicht unter Wasser so gut, dass ein Rettungstaucher auch mal bis zu 5 Meter weit sehen kann. Eine Absicherung mit Signalmann und Sicherungstauchern ist nach der Vorgabe der Unfallversicherungsträger (DGUV Regel 105-002) und natürlich auch zum Eigenschutz obligat. Seither konnte daher zwar mittels systematischer aber auch mit teilweise sehr aufwändigen Standardsuchmethoden ein Gewässer abgesucht werden. Zudem können Tauchtrupps nur relativ kleine Wasserflächen unter hohem Personal- und Zeitaufwand abgesucht werden.
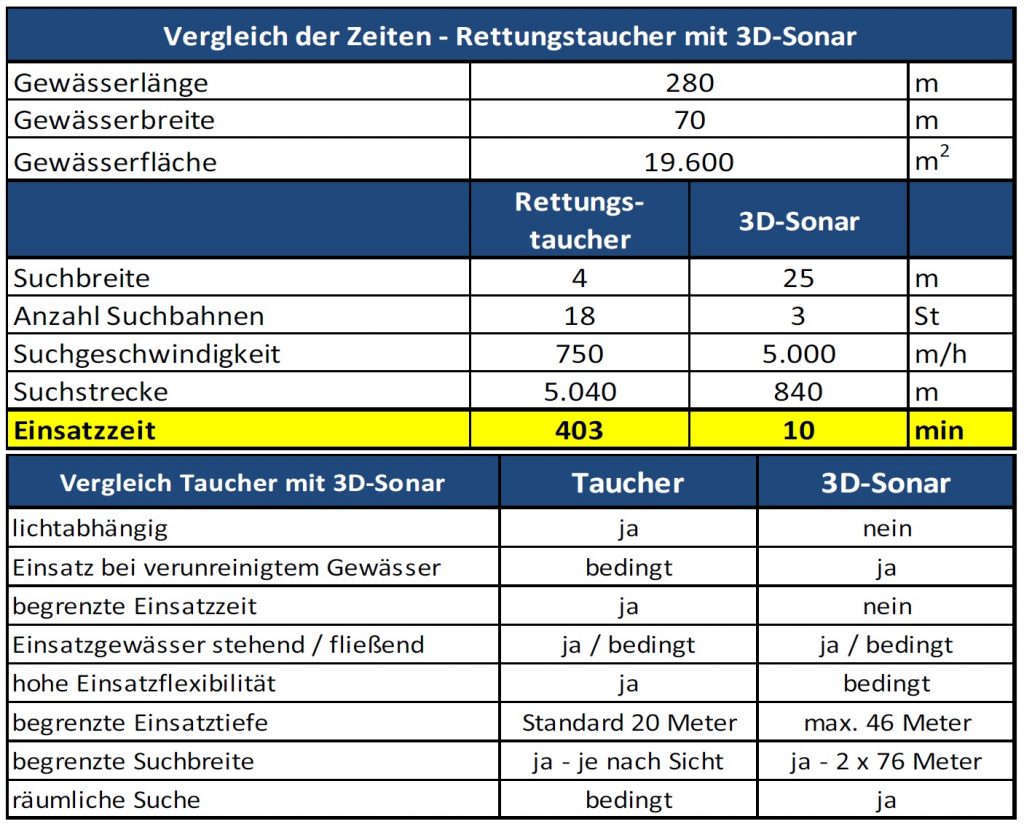
Mit einem 3D-Sonar ist es jetzt möglich, vor dem eigentlichen Taucheinsatz den Gewässerboden sowie den Bereich zwischen Wasseroberfläche und Gewässerboden – auch von größeren Wasserflächen – nach potentiellen Zielpunkten bzw. Hindernissen deutlich schneller als bisher abzusuchen. Zum Abscannen des Gewässergrunds ist allerdings eine umfangreiche Erfahrung bei der Bildauswertung nötig. Die Sonarcrew markiert die im 3D-Sonar auffälligen Kontakte, Einsatztaucher können dann im Anschluss die Fundanzeige, eine Personen oder einen Gegenstand verifizieren und gegebenenfalls bergen. Durch dieses Vorgehen können wertvolle Zeit eingespart und die Ressourcen von ehrenamtlichen Einsatzkräften gezielter eingesetzt werden.
Das Gerät eignet sich nicht nur zur Personensuche bei Ertrinkungsfällen sondern bildet auch Gegenstände und Unterwasserhindernisse ab, die eine Gefahr in den Badebereichen darstellen. Die Suche kann unabhängiger von Gewässertemperatur, – Sicht oder Verschmutzung und Tageszeit durchgeführt werden. Rettungstaucher haben reduzierte Tauchzeiten und dadurch ein geringeres gesundheitliches Risiko durch Aufsättigung mit Gasen unter Druck. Das 3D-Sonar kann auch vor Wehranlagen und Wasserkraftwerken per Handbetrieb mit einer Stange von Land eingesetzt werden.
Der erfolgreiche Einsatz eines 3D-Sonar setzt eine effiziente Zusammenarbeit der Einsatzleitung, der Führer des Motor-rettungsbootes und der Rettungstaucher voraus. Eine bessere Verknüpfung der Fachbereiche wird zur effektiven Nutzung des 3D- Sonar notwendig, eine Schulung und Einübung unausweichlich.
Taktische Vorgehensweise
Im Einsatzfall wird bis auf weiteres nach den bisherigen Einsatzverfahren vorgegangen (Alarmierung, Einsatzleitung sowie Einsatz des Personals). Zunächst arbeitet die Einsatzgruppe Technische Suche und Ortung, koordiniert durch den Einsatzleiter Wasserrettungsdienst in Verbindung mit dem Tauchereinsatzführer, parallel und ergänzend zu den bisherigen Einsatzressourcen.
Ein weiteres Motorrettungsboot befindet sich mit einem komplett ausgerüsteten Tauch-Trupp bzw. Wasserretter-Trupp in Rufbereitschaft um markierte Stellen zu erkunden. In Gewässern bis 5m Tiefe und guter Sicht kann die Erkundung auch durch Schnorchel – Taucher durchgeführt werden.

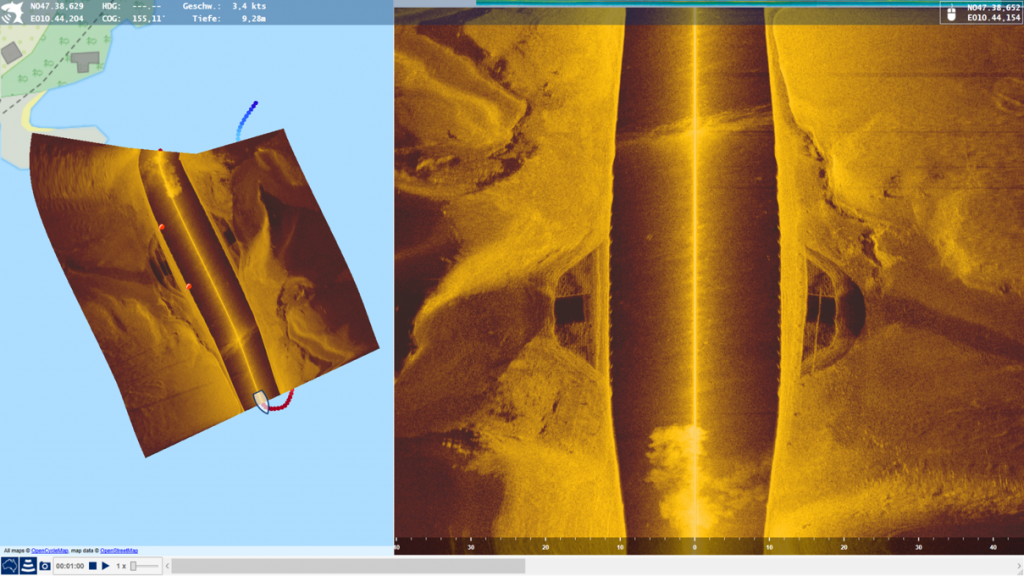
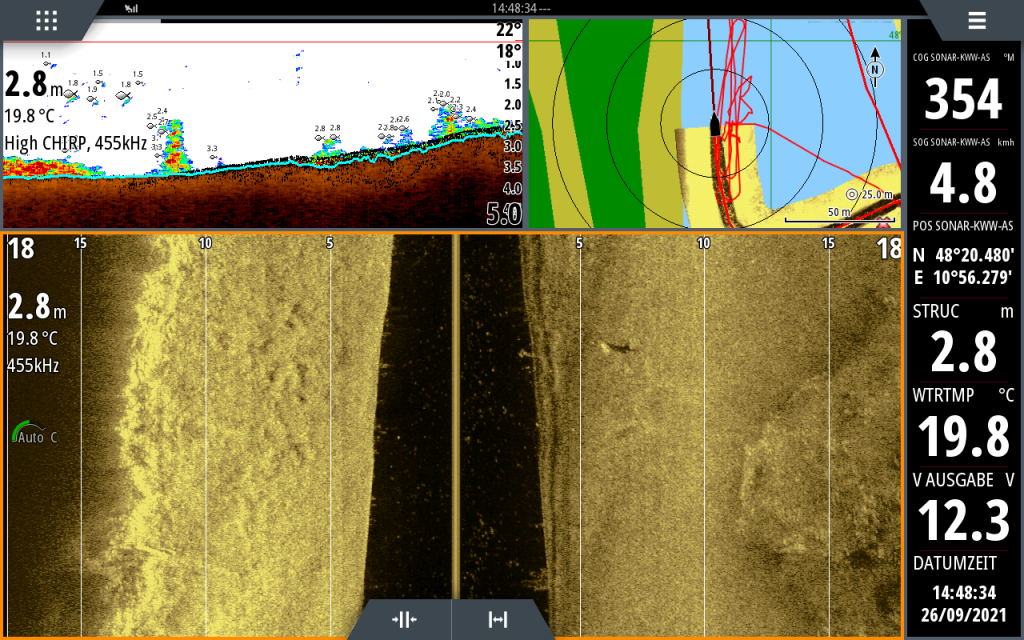
Das Sonarboot, besetzt mit zwei Sonar-Operator und einem Bootsführer, mäandert das Suchgebiet nach einem festgelegten Suchmuster sowie mit gleichbleibender Geschwindigkeit ab. Auffällige Punkte werden am Gerät gespeichert und eine Markierungsboje ins Wasser gesetzt. Bereits an der Einsatzstelle kann über einen Laptop an Land der auf einer SD Karte gespeicherte Sonardatensatz nochmals gesichtet und bewertet werden.
Topographische Gewässerkarten
Durch die gesammelten Daten der befahrenen Gewässer ist es nun möglich mit einer Software am PC Seekarten zu erstellen. Diese Seekarten können zu Schulungs- und Einsatzzwecke verwendet werden. Die Auswertung der Sonardaten am PC erfolgt mit der Software ReefMaster Sonar Viewer. Hiermit können aufgezeichneten Sonardaten an Land nochmals angeschaut und ausgewertet werden. Bei dieser zusätzlichen Auswertung werden auffällige Objekte markiert sowie die dazugehörigen GPS-Koordinaten gespeichert.
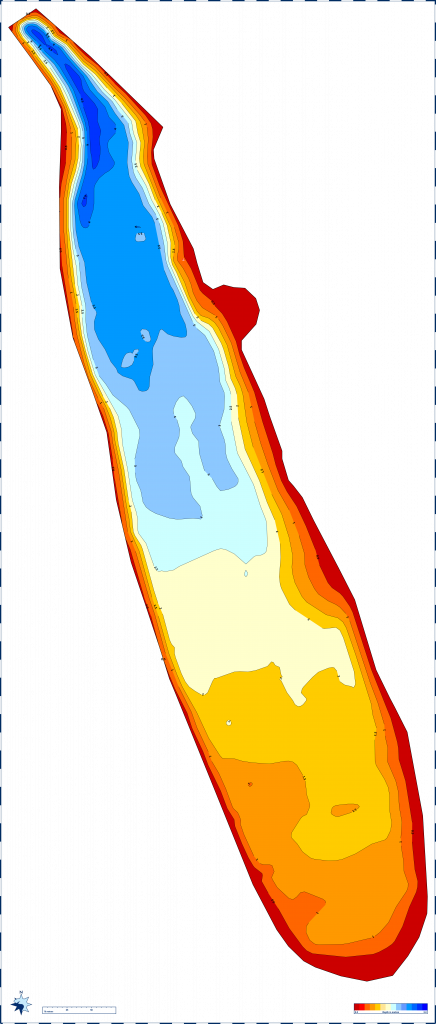
Topographische Gewässerkarten oder auch bathymetriesche Geländemodelle werden mit der Software ReefMaster 2.0 erstellt. Diese Karten könne nach der Erstellung auf das Sonargerät aufgespielt werden oder stehen den Einsatzkräften im Rahmen der Einsatzvorbereitung und bei realen Einsätzen zur Verfügung. Die Software und weitere Informationen befinden sich auf einem Fujitsu Laptop, der zur Ausrüstung der Einsatzgruppe Technische Suche und Ortung gehört.
Fazit
Alle bisher gemachten Erfahrungen im Rahmen von Tests, Schulung, Fortbildung und vor allem auch bei realen Wasserrettungseinsätzen haben die Leistungsfähigkeit bestätigt. Ein neues Einsatzmittel braucht seine Zeit, damit sich die Einsatzkräfte damit vertraut machen können und vor allem Erfahrungen sammeln können, das geht nicht von heut auf morgen! Den größten Beitrag leisten die aktiven Einsatzkräfte des Wasserrettungsdienstes wie Sonar-Operator und Motorbootsführer, welche sich bereiterklärt haben, die Suche mit 3D-Sonar zu erlernen und im Einsatzfall anwenden können.
In den letzten Jahren haben sich unabhängig voneinander im Bereich des BV Schwabens mehrere Kreis-Wasserwachten und Ortsgruppen mit dem Thema 3D-Sonar beschäftigt. Jetzt wurden in mehreren Gesprächen die bisher gemachten Erfahrungen ausgetauscht und bestätigt – es ist eine gute Investition in die Zukunft.
Durch die Einbindung der zur Verfügung stehenden Einsatzmittel sowie durch den hohen Ausbildungsstand der Einsatzkräfte der Wasserwacht ist ein professionelles Handeln auch in der Zukunft möglich.
Das Humminbird 3D-Sonar wurde im Jahr 2011 durch zwei zweckgebundene Spenden von der IMA Ingenieurbüro Anton Abele und Partner GmbH aus Augsburg und Bootsteile Enßlin GmbH aus Augsburg finanziert – Herzlichen Dank hierfür! Hier geht´s zum Bericht.

Meilensteine & Erfahrungen
- Jahr 2009
- erste Überlegungen zu technischen Hilfsmitteln nach der Fortbildung “Suchtechniken mit MRB und Rettungstauchern“
- Jahr 2010
- erste Vorüberlegungen, Diskussionen und “Projektstart Sonar“
- Jahr 2011
- Lastenhefterstellung
- Gerätetest mit einem 3D-Sonargerät vom Hersteller SIMRAD
- Beschaffung und Inbetriebnahme HUMMINBIRD 1198C
- Gründung der “Einsatzgruppe Sonar“
- Jahr 2012
- Schulung der Einsatzkräfte der KWW Augsburg-Stadt
- Erkundungsfahrten im Raum Augsburg
- Indienststellung der “Einsatzgruppe Sonar“
- Stationierung des 3D-Sonargerätes bei der SEG Kuhsee
- Jahr 2013 bis heute
- laufende Aus- und Fortbildung der Einsatzkräfte
- Erkundungsfahrten im Raum Augsburg und Umgebung
- Sammlung von Erfahrungen in realen Einsatzgeschehen
- Schulung und Erfahrungsaustausch mit anderen Sonargruppen
- Erstellung von Gewässerkarten
- Jahr 2019
- Gerätetest SIMRAD NSS12EVO3 über den kompletten Sommer. Nach erfolgreichem Gerätetest wurde die Beschaffung des SIMRAD NSS12EVO3 beschlossen.
- Jahr 2020
- Beschaffung und Inbetriebnahme eines Laptop zur Auswertung am PC
- Beschaffung und Inbetriebnahme einer Software zur Nachbearbeitung aufgezeichneter Sonardaten am PC inclusive Erstellung von topographischen Gewässerkarten
- Beschaffung und Inbetriebnahme SIMRAD NSS 12EVO3
- Überarbeitung der Ausbildungsunterlagen auf den neuesten Stand der Technik
- Jahr 2021
- Beschaffung einer speziellen Übungspuppe für die Unterwasserortung
- 1. Bezirkslehrgang „Grundschulung Sonar-Operator“ des Bezirksverbandes Schwaben, durchgeführt von den erfahrenen Sonar-Operatoren aus Augsburg
- Mitarbeit in der Arbeitsgruppe Technische Suche und Ortung im Wasserrettungsdienst der Wasserwacht Bayern
- 10 jähriges Bestehen der Einsatzgruppe Sonar der Wasserwacht Augsburg-Stadt
- Jahr 2022
- Umbenennung von Einsatzgruppe Sonar zur Einsatzgruppe Technische Suche und Ortung
- 2. Bezirkslehrgang „Grundschulung Sonar-Operator“ des Bezirksverbandes Schwaben, durchgeführt von den erfahrenen Sonar-Operatoren aus Augsburg
- Gerätetest Garmin GPSMAP 8412XSV mit GT56UHD
- Besuch der Wasserwacht Cham zum Erfahrungsaustausch
- Mitarbeit in der Arbeitsgruppe Technische Suche und Ortung der Wasserwacht Bayern
- Erste Erfahrungen mit einem Tauchroboter Chasing M2
- Jahr 2023
- Ausbau der Tätigkeiten im Bereich der Aus- und Fortbildung
- Gerätetest LOWRANCE HDS PRO 12 über den kompletten Sommer.
- Besuch der Wasserwacht Brandenburg zur Ausbildung
- Besuch der Wasserwacht Unterfranken zur Ausbildung
- Besuch der UG SAN-EL Garmisch zum Erfahrungsaustausch
- Mitarbeit in der Arbeitsgruppe Technische Suche und Ortung im Wasserrettungsdienst der Wasserwacht Bayern
- Jahr 2024
- laufende Aus- und Fortbildungen
- Mitarbeit in der Arbeitsgruppe Technische Suche und Ortung im Wasserrettungsdienst der Wasserwacht Bayern
- Jahr 2025
- laufende Aus- und Fortbildungen
- Beschaffung und Inbetriebnahme LOWRANCE HDS PRO 16
- Mitarbeit im Forschungsprojekt KI-Sonar in Zusammenarbeit mit der Technischen Hochschule Nürnberg und der Wasserwacht Bayern.
- Mitarbeit in der Arbeitsgruppe Technische Suche und Ortung im Wasserrettungsdienst der Wasserwacht Bayern
Aus- und Fortbildung
Die Wasserwacht Augsburg-Stadt ist für die Aus- und Fortbildung der Einsatzkräfte der Einsatzgruppe Technische Suche und Ortung verantwortlich. Die über die Jahre gewonnenen Erfahrungen werden in verschiedenen Modulen in Theorie und Praxis den Einsatzkräften vermittelt.
Die Leitung der Einsatzgruppe Technische Suche und Ortung wird zur Aus- und Fortbildung von erfahrenen Sonar-Operator unterstütz. Die Schwerpunkte gliedern sich hierbei wie folgt:
Gerätevorführung und Information über die Technik
Informationsveranstaltung für alle am Sonarprojekt weitgehend Beteiligten (Technische Leiter, Ortsvorsitzende, Einsatzleiter, Gruppenführer, spätere Sonar-Operator, Projektleitung). Es wird vor allem ein Überblick über die Technik und die Nutzungsmöglichkeiten des Geräts erfolgen. Ebenso wird die einsatztaktische Einbindung skizziert.
Ausbildung der Sonar-Operator
Detaillierte Ausbildung in Technik und Anwendung des Sonargeräts, Bearbeitung von einsatztaktischen Fragen und Erlernen der Ergebnisdokumentation und Abrechnung. Das Üben der Einsatzpraxis auf unterschiedlichen MRB und in unterschiedlichen Gewässerbedingungen steht hier im Vordergrund.

Fortbildung der Inhaber BFZ Motorrettungsboot
Für den Sucherfolg ist ein rasches zielgerichtetes und fehlerfreies Absuchen einer Wasserfläche erforderlich. Für den Betrieb eines Motorrettungsbootes sind zur lückenlosen Suche Kenntnisse in der sicheren und fehlerfreien Flächensuche und Kursnavigation erforderlich. Diese Fähigkeiten werden mit den entsprechenden Bootsführern in einem Fortbildungsmodul erlernt/ wiederholt und in der Praxis geübt.
Fortbildung der Einsatzgruppe Technische Suche und Ortung
Nach der erfolgreichen Teilnahme an der Grundschulung zur Bedienung der Sonaranlage muss jede Einsatzkraft durch eine Fortbildung das erlernte Wissen aufrechterhalten.
Übungspuppe für die Unterwasserortung
Für die qualitativ hochwertige Aus- und Fortbildung der Sonar-Operator wurde von der Kreiswasserwacht Augsburg-Stadt im Jahr 2021 eine spezielle Übungspuppe für die Unterwasserortung mit Sonargeräten beschafft. Die Übungspuppe hat einen Größe von 1,80 Meter und ein Gewicht von 50 kg. Durch diese Übungspuppe können realistische Sonarbilder von untergegangenen Personen erzeugt werden, die von den Sonar-Operator gedeutet werden sollen. Die Übungspuppe kann auch zur Aus- und Fortbildung von Wasserrettern, Rettungstauchern und Bootsbesatzungen verwendet werden.


Projekt Zukunft
Wir durften für den BRK Landesverband Bayern im Magazin „Einsatzbereit 05/2017“ das 3-D Sonar im Wasserrettungsdienst vorstellen. Dabei wurden im September 2017 mit dem Sonarteam am Kuhsee tolle Bilder aufgenommen und ein Film gedreht. Thema der Ausgabe war: Innovation und Digitalisierung zum Wohle der Menschen.
„Indem wir vor dem Einsatz der Rettungstaucher das 3-D-Sonar nutzen, um mögliche Suchorte zu identifizieren, steigern wir den Sucherfolg und die Effizienz der Rettungstaucher extrem.“ Michael Messtorff, Leiter der SEG Kuhsee und Verantwortlich für das 3D-Sonar der Wasserwacht Augsburg-Stadt.
SIMRAD Gerätetest
Im Jahr 2019 konnten wir einen Gerätetest mit einem Sonargerät Typ SIMRAD NSS 12 EVO3 durchführen. Hier geht´s zum Bericht.

Spendenübergabe eines Laptop für die Einsatzgruppe Sonar
Am 08. Juni 2020 erhielt die Einsatzgruppe Sonar der Wasserwacht Augsburg-Stadt einen Fujitsu Laptop von der Firma AsTiNA gespendet. Hier geht´s zum Bericht.

Wir sagen herzlichen Dank für die großzügige und großartige Unterstützung!

Beschaffung SIMRAD NSS12 EVO3
Anfang Juli 2020 eine Delegation der Wasserwacht Augsburg-Stadt und der Wasserwacht Mering jeweils ein hochmodernes 3D-Sonargerät mit reichlich Zubehör bei der On Yacht GmbH in Gersthofen ab.

Zeitgleich wurden zwei baugleiche 3D-Sonargeräte der Firma SIMRAD Typ NSS12 EVO3 beschafft, auf Grund der vorherrschenden COVID-19 Pandemie verzögerte sich jedoch alles vom Frühjahr in den Sommer hinein.
Für die Wasserwacht aus Mering ist die Beschaffung und zeitnahe Inbetriebnahme eines 3D-Sonars für den Wasserrettungsdienst „Neuland“. Die Wasserwacht Augsburg-Stadt modernisiert ihre bestehende Ausrüstung und nimmt mit dem SIMRAD NSS12 EVO3 bereits das zweite 3D-Sonar in Betrieb. Das bereits in Dienst gestellte HUMMINBIRD 3D-Sonar wird als Reservegerät von der Wasserwacht Augsburg-Stadt weiter einsatzbereit vorgehalten.

10 Jahre Einsatzgruppe Sonar – Rückblick und ein Blick in die Zukunft
Seit der Gründung der Einsatzgruppe Sonar der Wasserwacht Augsburg-Stadt im Jahr 2011 sind nun 10 sehr erfolgreiche Jahre wie im Flug vergangen. Die bisher geleistete Arbeit zum Aufbau der Einsatzgruppe und der damit verbundenen 24/7 Einsatzbereitschaft sowie der Erstellung eines eigenen Aus- und Fortbildungskonzeptes ist bereits weit über die Stadtgrenze von Augsburg bekannt.

Garmin Gerätetest
Über den Sommer 2022 können wir ein GARMIN GPSMAP 8412 testen, zur Verfürgung gestellt durch die OnYacht GmbH.
